
卒業研究の課題である可搬型ロボット・システムの機能追加が、機能の確認、試作、そして実用化につながった事例を紹介します。
対象となるのは、米国空軍の可搬型ロボット・システムです。
ビデオカメラの画像を見ながらロボット・ハンドを備えるロボット・システムを操作しますが、操作者には深度がわからないため精密な作業が難しいという課題がありました。
深度を検知する機能追加は技術的には可能でしたが、コスト増や大幅な機能追加が必要となるため、追加センサーを使わず、複雑な処理も追加しないですむことが求められています。
ここでは、米国空軍のWebサイトの情報と写真を使い、卒業研究の課題である可搬型ロボット・システムの機能追加が、機能の確認、試作、そして実用化につながった事例を紹介します。
アイディアが実現可能か確認し、試作をつくり、試作の完成度を上げていく。なかなか機会がないかもしれませんが、チャンスがあればやってみることをおすすめします。
ロボットアームの深度知覚システムが必要な理由
可搬型ロボット・システムを使うことで、簡易ロケット弾のような爆発する危険のある物を遠隔操作により処理することができます。
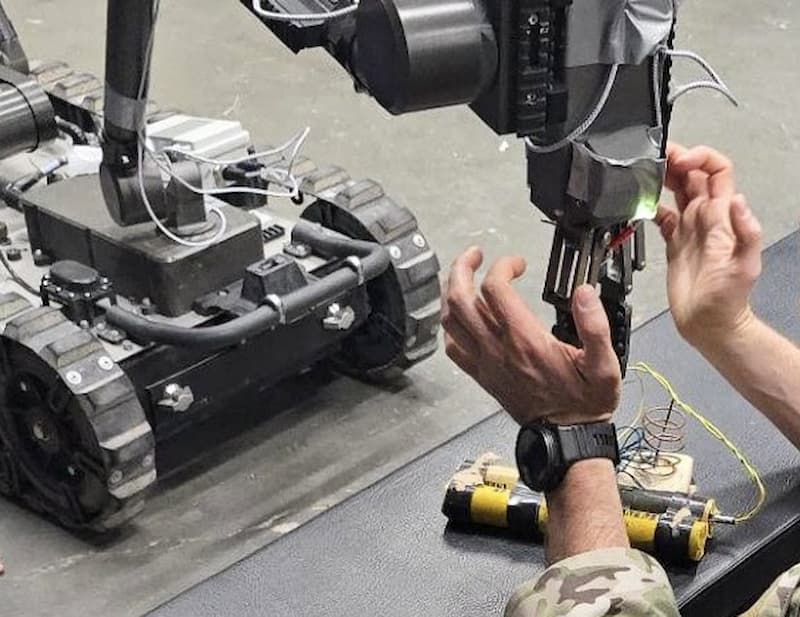
下図は、米国空軍の可搬型ロボット・システムの写真です。
- 演習での可搬型ロボット・システムによる簡易ロケット弾(improvised rocket)を処理する写真です。
- 下図左側の4本の筒が、簡易ロケット弾です。

230920-F-LE520-1130 A Man Transportable Robotics system is used to assess an improvised rocket during Exercise GOLDEN CRAB on Beale Air Force Base, California, Sept. 20, 2023. An explosive ordnance disposal team was sent out to respond to a long range threat and used the robotics system to assess the situation from a safe distance. (U.S. Air Force photo by Senior Airman Alexis Pentzer)
図1 可搬型ロボット・システム
出典:AIR FORCE RESEARCH LABORATORY(米国空軍)のWebサイト<Home > News > Photos>からの画像
可搬型ロボット・システムによる危険物の処理の課題
図1の可搬型ロボット・システムは、車体後方のアーム上のビデオカメラ画像を見ながら、車体前方のロボット・ハンドを操作しています。
ビデオカメラ画像では、対象物(上図では簡易ロケット弾)までの奥行きがわからないため、繊細な取り扱いが必要な爆発物の取扱いが難しいという課題があります。
言い換えると、可搬型ロボット・システムを操作する際、ビデオカメラから得られる平面的な2次元映像では深度を測りにくいということです。
奥行きがわかるようにするための立体視機能がないため、次のような工夫をしていました。
- ロボット・ハンドの影を観察する。
- グリッパーに結束バンドを取り付けて目安にする。
立体視機能追加と同じ優先度でのコスト要求
可搬型ロボット・システムに一般的な立体視機能を付加することは、技術的には可能ですがコストがかかります。
このため、できるだけ小さいコストにより、立体視機能相当の機能を実現することが同時にもとめられていました。
卒業研究テーマでの取り組み
卒業研究のテーマとして次の課題への取り組みがありました。
- 可搬型ロボット・システムに立体視ができる(深度がわかる機能付加)
- 期間は2か月間
最初の取り組みは、ガレージ作業(趣味の作業)の様な機能を実現できる試作機の製作でした。
- 追加センサーを必要としない。
- 複雑な処理を必要としない。
- ロボット・システムの操作者が距離感(深度)を明確に伝える。
機能実現の確認
この段階の試作機は、趣味レベルの部品と私費で製作したそうです。
機能を実現することを最優先に、試行錯誤し、手作りで試作機を作ったということです。
何とか実現できそうだけれど、やってみないとわからないことなので、設計したり、予算を立てて計画を作って進めることが難しい段階での試作と機能確認になります。
試行錯誤の末、動作させることに成功します。
次は、実機(ロボット・システム)を使った試作機開発に進みます。
ロボット・システムを使った再現
動作確認(機能確認)の次は、ロボット・システムへの取付です。
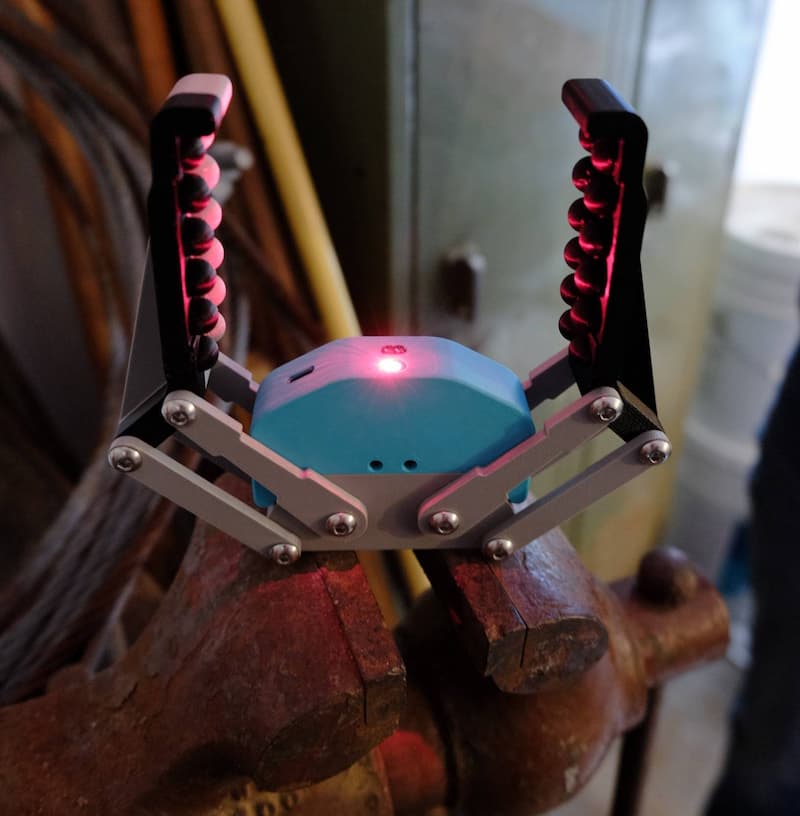
下図は、テープなどありあわせの材料を使って、カメラの視野角にあわせて部品を取り付けた写真です。
- ロボット・ハンドの中央にセンサーが追加されています。
- センサーの下部に伸びているのは結束バンドのようです。センサーの位置を知る参考にているのかもしれません。

250829-O-UM138-1061P EOD Robot System Developed by former Air Force Master Sgt. Daniel Trombone and Air Force Tech. Sgt. Matt Ruben, the explosive ordnance disposal robot depth-perception system provides robot operators a clearer sense of depth, improving safety, speed and precision in high-stakes missions.
図2-1 試作機
出典:AIR FORCE MATERIEL COMMAND(米国空軍)のWebサイト<Home > News > Photos>からの画像(加工しています。)
見た目は「これで使えるのか」という出来映えでしたが、ロボット・システムの操作者が次のことをできることを確認することができました。
- 距離を従来より正確に判断する。
- ロボット・ハンドによるより精密な作業ができる。
下図は、赤い旗の位置を把握できるか確認している写真だと思います。
- 影の位置を利用するというのは、下図のようなイメージになるのかもしれません。

250829-O-FN095-3876P EOD Robotics System Developed by former Air Force Master Sgt. Daniel Trombone and Air Force Tech. Sgt. Matt Ruben, the explosive ordnance disposal robot depth-perception system provides robot operators a clearer sense of depth, improving safety, speed and precision in high-stakes EOD missions.
図2-2 試作機
出典:AIR FORCE MATERIEL COMMAND(米国空軍)のWebサイト<Home > News > Photos>からの画像(加工しています。)
下図は、グリッパーを閉じている写真です。
- 対象物をグリッパーでつかめるか確認しているようです。
250829-O-FN095-8060P EOD Robot An explosive ordnance disposal robot depth-perception system, developed by former Air Force Master Sgt. Daniel Trombone and Air Force Tech. Sgt. Matt Ruben, provides robot operators a clearer sense of depth to improve safety, speed and precision in high-stakes EOD missions.
図2-3 試作機
出典:AIR FORCE MATERIEL COMMAND(米国空軍)のWebサイト<Home > News > Photos>からの画像(加工しています。)
試作機のブラッシュ・アップ
ロボット・システムを使い機能を実現することを確認できると、ハウジングやブラケットを3D CADで設計、3Dプリンタで製作するなどして、完成度を高めていきます。
下図、青色の部品が3Dプリンタで製作したハウジングだと思います。
250829-O-FN095-1899 EOD Robot Developed by former Air Force Master Sgt. Daniel Trombone and Air Force Tech. Sgt. Matt Ruben, the explosive ordnance disposal robot depth-perception system provides robot operators a clearer sense of depth, improving safety, speed and precision in high-stakes EOD missions.
図2-4 試作機
出典:AIR FORCE MATERIEL COMMAND(米国空軍)のWebサイト<Home > News > Photos>からの画像(加工しています。)
拡張性の不足といきづまり対策
試作機により有効性は確認できていたものの、拡張性に欠けていました。
これを打開するためには、エンジニアリング・チームによる支援を必要としていました。
その後、the AFWERX Refineryに応募し、資金や技術支援を受ける道が開けることになりました。
思いついたアイディアを実際に形にしたり、それがビジネスベースのプロジェクトにつながるケースは多くはありませんが、かつてのアメリカン・ドリームの様なワクワク感を感じました。
参考リンク
この記事は、主に以下のWebサイトの情報をまとめています。
英文サイトを和訳していることと、私の理解した内容なので正確な情報は、以下の情報をご参照ください。
- From Capstone to Combat Readiness: Depth-Perception System Enhances EOD Robotics

まとめ
米国空軍の可搬型ロボットシステムにコストを抑えた深度検知機能を追加した事例について、米国空軍のWebサイトの情報と写真を使い以下の項目で説明しました。
- ロボットアームの深度知覚システムが必要な理由
- 可搬型ロボット・システムによる危険物の処理の課題
- 立体視機能追加と同じ優先度でのコスト要求
- 卒業研究テーマでの取り組み
- 機能実現の確認
- ロボット・システムを使った再現
- 試作機のブラッシュ・アップ
- 拡張性の不足といきづまり対策
- 参考リンク
アイディアを実現可能か確認し、試作をつくり、試作の完成度を上げていくような機会は、なかなかないかもしれませんが、チャンスがあればやってみることをおすすめします。
