振動制御について、これまでの知識や経験を、振動制御入門者向けにまとめています。
制御やモデリングの一例を知るヒントにもなれば幸いです。
ブログ記事にまとめるにあたり、本や資料を改めて読みながら、振動制御の幅広さと奥深さを感じつつ勉強しているような感じです。
振動制御の主要プロセスと流れ
振動対策の1つとしてアクティブ制振に関する様々な研究がなされ、現在ではスカイツリーなど実際の高層建築物にも使われています。
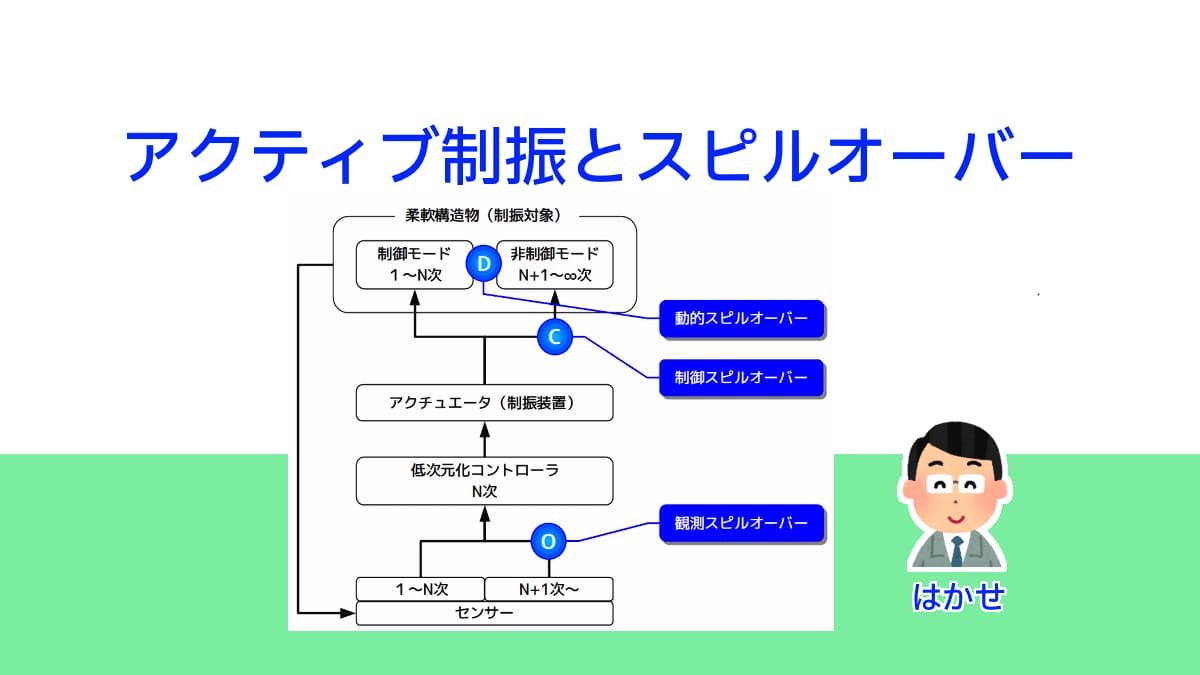
アクティブ制振は、高い制振効果を得られる反面、スピルオーバーと呼ばれる不安定現象への対策が不可欠です。

振動制御入門で紹介しているアクティブ制振では、振動モード形の節を利用したモデリングとLQ最適制御理論で制御系を設計しています。
ここで、振動制御の主なプロセスをフローにしてみると下図の様になります。
- FEM(固有値解析)の解析結果として振動モード形を使います。
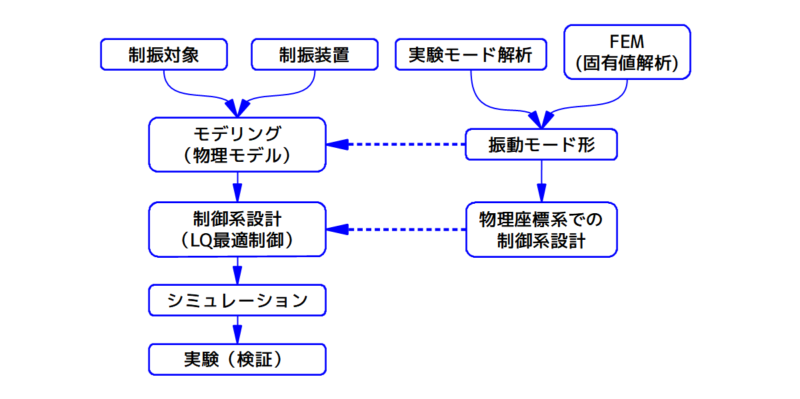
図 振動制御の主なプロセスフロー
シミュレーションと実験の事例
塔状構造物の水平2方向の制振
スカイツリーの様な塔状構造物のアクティブ振動制御について、モデリング、制御系設計、実験により紹介しています。

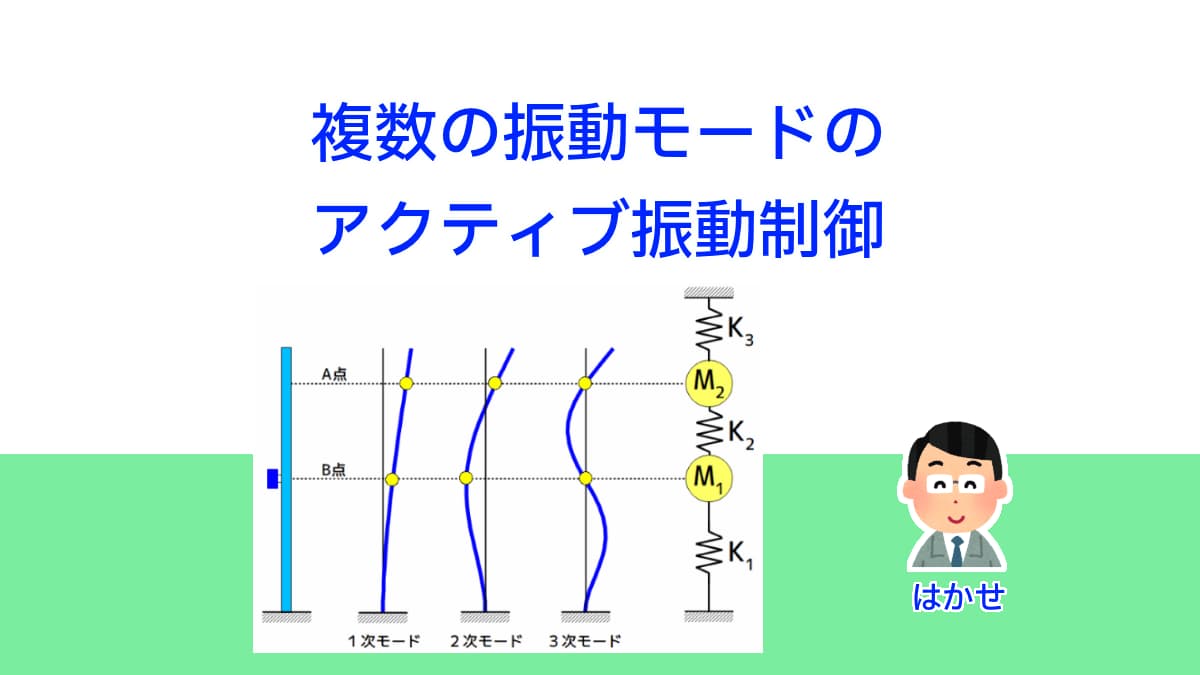
柔軟構造物の複数の振動モードの制振
高層建築物などの柔軟構造物の1次と2次の振動モードの制振についてまとめています。ここでは、3次モードの節を制振対象のモデルの質点の位置として、3次モードによるスピルオーバーの発生を防止しています。
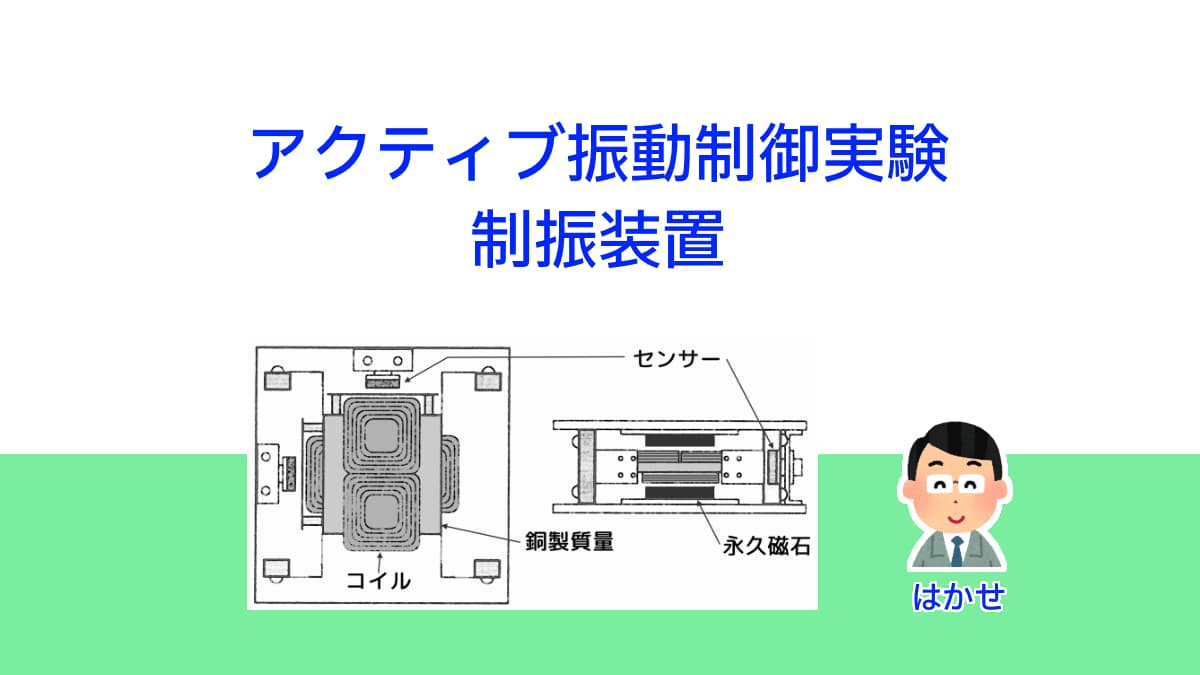
アクティブ制振装置の紹介
大学の研究室で使っていたアクティブ動吸振器やハイブリッド動吸振器を紹介しています。

モデリングと制御系設計の詳細については、以下に説明します。
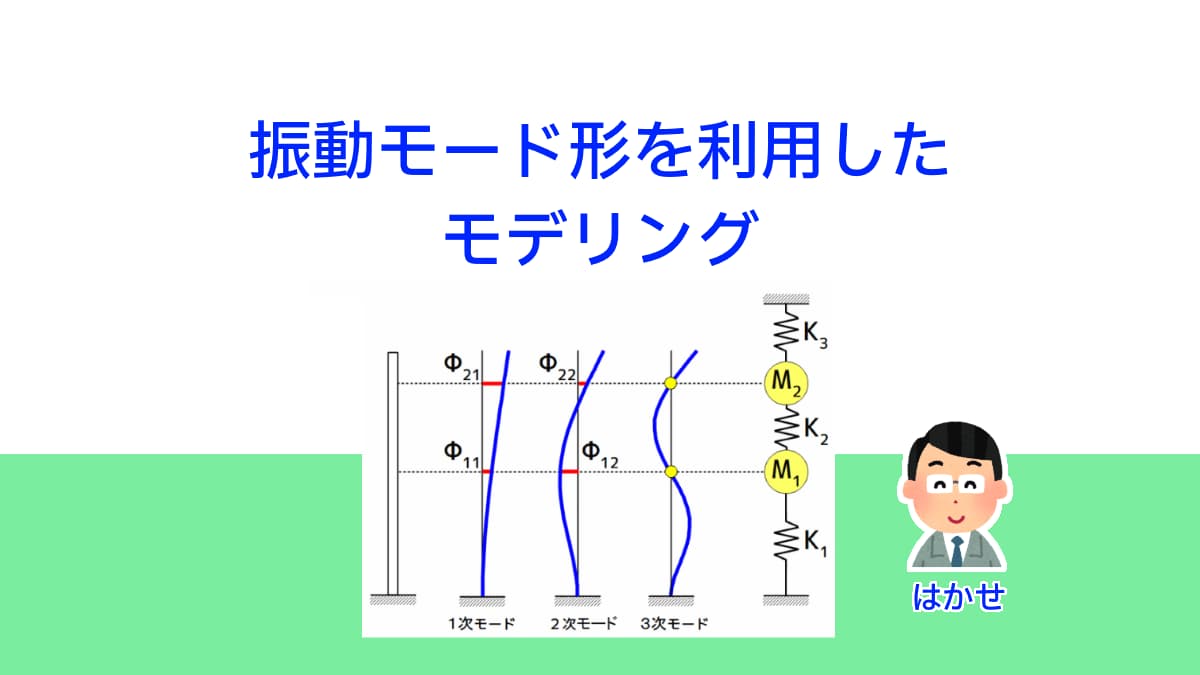
振動モード形を利用したモデリング入門
振動モード形の節が持つ不可制御・不可観測性を利用したモデリングについて、理論的な部分を含めて説明しています。
このモデリング方法には、次のような特長があります。
- 振動モード形を積極的に利用したスピルオーバー防止
- 物理座標系でのモデリングにより、センサー信号による状態フィードバック制御を実現
振動モード形の節の位置でモデリングするため、固有モードを修正して制御モデルを作成しています。
現代制御理論では時間領域での設計が多く、振動モード形を利用する周波数領域での制御系設計は珍しいそうです。
等価質量同定法について
モデリング点に質量を付加して固有振動数を計測し、等価質量を求める方法を説明しています。

センサー及びアクチュエータの配置についての実験的考察
スカイツリーや超高層ビルの様な柔軟構造物の振動制御の課題の1つである、センサーとアクチュエータの配置について、実験と考察について説明しています。
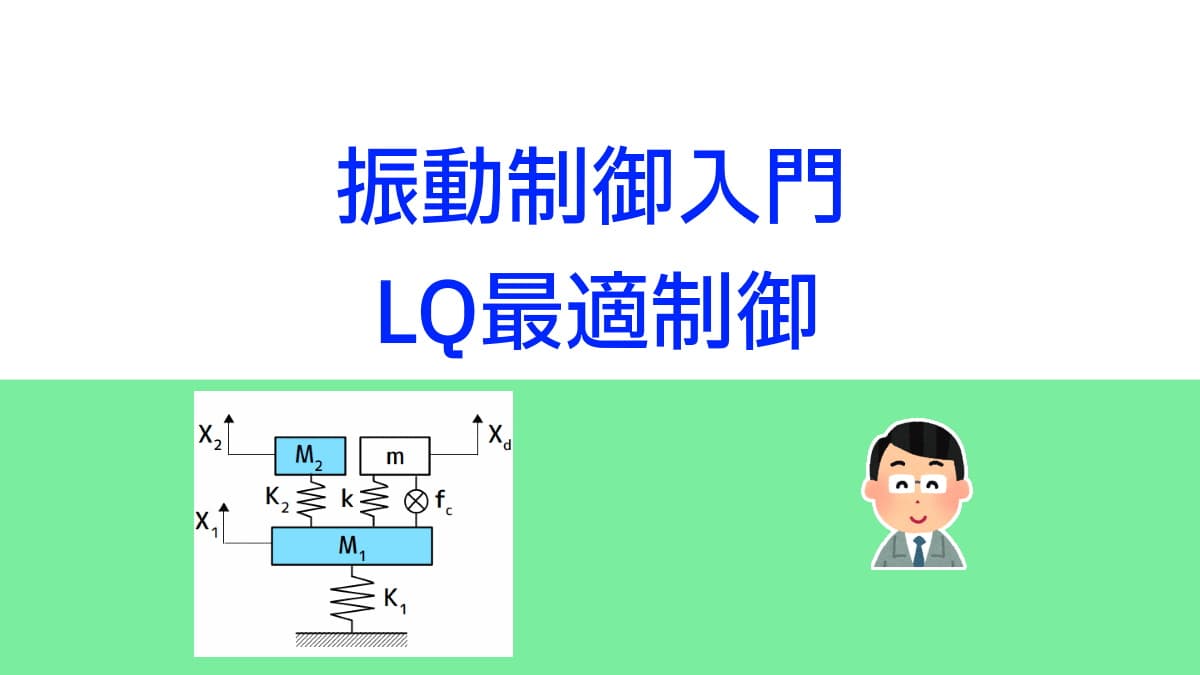
LQ最適制御による制御系設計入門
現代制御理論は時間領域で設計するのが一般的ですが、ここで紹介しているLQ制御理論を使った制御系設計は、振動モード形を利用して物理座標系で制御系を設計します。

振動モード形を使うため周波数領域での設計となるのですが、ユニークなポイントとも言えます。
無次元系の状態方程式による制御系設計
現代制御理論の1つであるLQ制御理論では線形2次形式の評価関数を最小にすることで制御性能と制御入力の設計要求を同時に満足させるフィードバックゲインを決定することができます。
しかし、設計パラメータである重み係数と制振効果との関係が明らかではないため、試行錯誤的に重み係数を決定しているのが現状です。
そこで、一般的な数値解析結果を得るため、無次元化状態方程式を使った制御系設計方法について説明しています。
制御系設計ツールの紹介
制御系設計ツールのデファクトスタンダードは、MathWork社のMATLAB/Simulinkです。
オープンソースではGNU Octave(オクターブ)が使いやすいと思います。