振動対策の1つとして、アクティブ制振に関する様々な研究がなされ、現在では実際の高層ビルへの適用例も見られます。
「振動モード形を利用したモデルによるタワー構造物のLQ最適制御入門」でスカイツリーなどの塔状構造物の振動制御について紹介していますが、アクティブ制振の際には、スピルオーバーと呼ばれる不安定現象の対策が不可欠です。
ここでは、様々な振動対策とスピルオーバーについて説明します。
振動対策の種類:構造変更と振動制御(振動絶縁、制振)
振動対策を制振対象と振動源とが分離できるかに着目して分類すると、
- 構造変更
- 振動制御
に分類することができます。
振動制御は、さらに、
- 振動絶縁:振動源から制振対象に伝達される振動を遮断・緩和する。
- 制振:制振対象の内部減衰の不足を外部から補い、共振や不安定振動の防止や過渡振動の速やかな減衰を図る。
とに分類されます。
以下、構造変更と振動制御(振動絶縁、制振)について説明します。
構造変更
構造変更とは、文字通り構造物そのものを外乱に対し強い構造になるよう設計(構造)を変更することです。
高層建築物は、風等により揺れます。その揺れは、その最上部において最も大きなものとなります。
このため、風などの外乱による建築物の揺れを構造物が「しなやかにたわむ」ことにより和らげる柔軟構造設計法と呼ばれる構造変更が主として行われてきました。
しかし、スカイツリーや超高層ビルなどの大規模柔軟構造物においては、構造変更のみでは十分な振動対策が難しくなってきています。
構造変更のみでの振動対策では十分な対策が難しくなっている理由の1つに、「構造変更が建築物に対し積極的に減衰を付与する設計ではないため、外乱による建築物の振動エネルギを効果的に吸収できないこと」があります。
振動制御:振動絶縁
振動絶縁とは、振動源から構造物への振動伝達を緩和することであり、 主としてパッシブな方法で精密加工を行う工作機械や低層のビル等に実際に使われています。
超LSIなどの半導体製造装置等には、振動遮断を実現するアクティブ除振も使われています。
除振台として市販されているものもあります。
振動制御:パッシブ制振とアクティブ制振
制振とは、文字通り構造物の振動を制御することです。
構造物に減衰を付与することにより、振動の振幅を低減化(小さく)し、制振対象を安定化させます。
この減衰を付与する方法は、パッシブ制振とアクティブ制振とに分類されます。
パッシブ制振は、動吸振器(受動的動吸振器)と呼ばれる制振装置により、制振対象に対し補助質量の慣性力を反力としてパッシブ(受動的)に減衰を付与します。
柔軟構造物を制振するための動吸振器の設計法も確立されています。
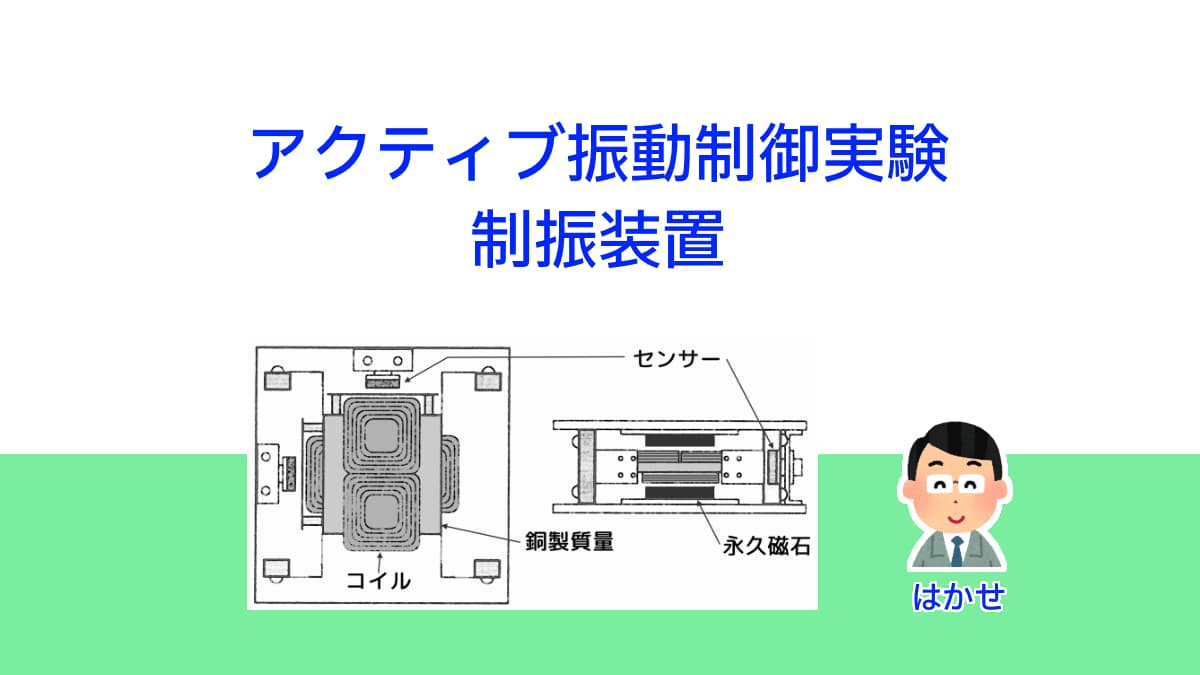
一方、アクティブ制振は、制振装置に制御力を加え、制振対象にアクティブに減衰を加えます。
アクティブ制振は、パッシブ制振よりも大きな制振効果を得ることができるため、スカイツリーや超高層ビルなどに使われています。
また、長大橋等の建設の様に、工事の進展に伴い制振対象の質量・ 剛性等が逐次変化する場合、パッシブ制振は制御系の再調整を必要としますが、アクティブ制振は制振対象のパラメータ変動にも強いため、この様な場合にも有利な制振方法です。
アクティブ制振の課題:コントローラの制約とモデリング
アクティブ制振は、高い制振効果を得ることができる反面、コントローラの制約から制振対象の低次元化が必要となります。
制御モデルには、実際に動かすために必要なコストと制振効果とのバランスが求められます。FEMの固有値解析の際のモデル詳細度やメッシュ数と同じ様に、目的に応じたモデルが必要になるということです。
この低次元化の際、振動解析により制振対象の詳細な特性が得られた場合においても、低次元化による影響がスピルオーバーと呼ばれる不安定現象の原因となることが多く、これをいかに抑制するかがアクティブ制振を実現する上での課題の1つとなっています。
これが、構造物固有の振動系を制御するために、構造物そのもののモデリングが重要であると言われる理由の1つです。
スピルオーバーとは何か
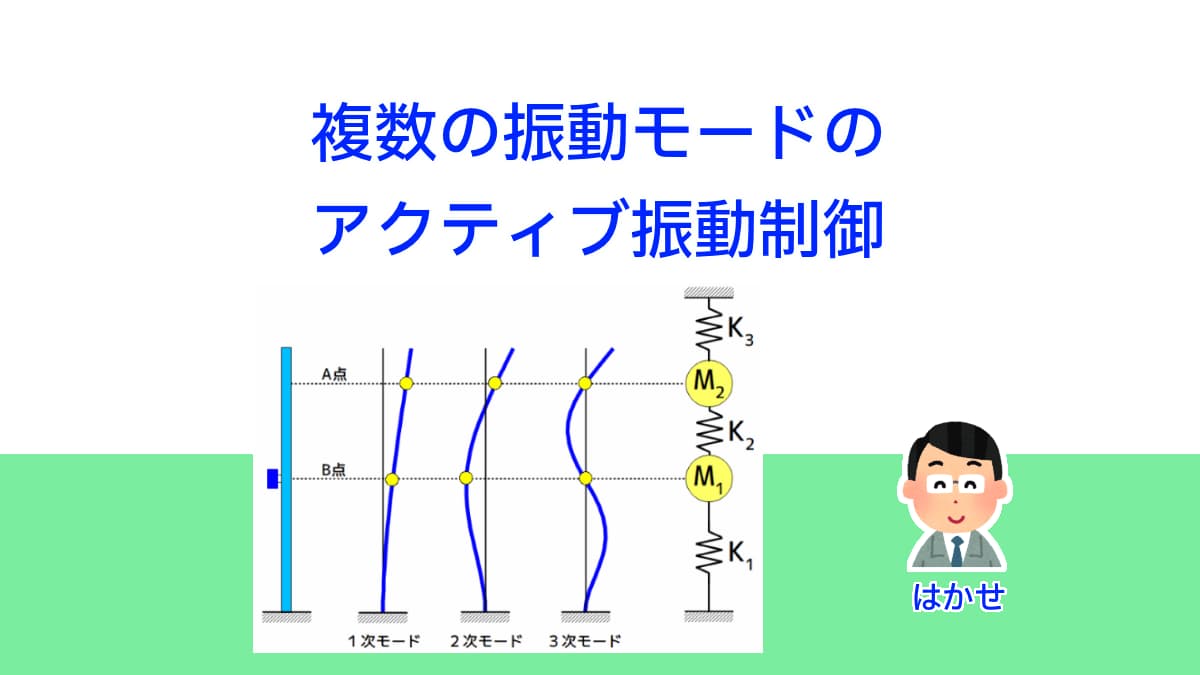
塔状構造物の様な柔軟構造物の振動制御における、低次元化モデルの作成とスピルオーバー対策との間には密接な関係があります。
柔軟構造物は本質的に無限自由度であり、厳密に言えば無限の固有振動数を持っています。
このため、制振するためには低次元化した制御モデルが必要不可欠であるため、スピルオーバー対策が必要になります。
このため、いかにして本来無限の自由度を持つ柔軟構造物の正確なモードを求めるかが重要となっています。
特に、Balasによって指摘された低次元化コントローラによるスピルオーバー問題は、柔軟構造物の振動制御を行う場合の大きな技術的課題となっています。
一方、適切な制振対象の低次元化モデルを得られれば、様々な制御系設計用ツールを用いて、容易に制御系を設計することができます。
モデルを作れれば、御は簡単という制御屋さん、モデルは作れるけれど制御が難しいと言う制御理論系の専門家。やろうとしていることは両者とも同じなのですが。
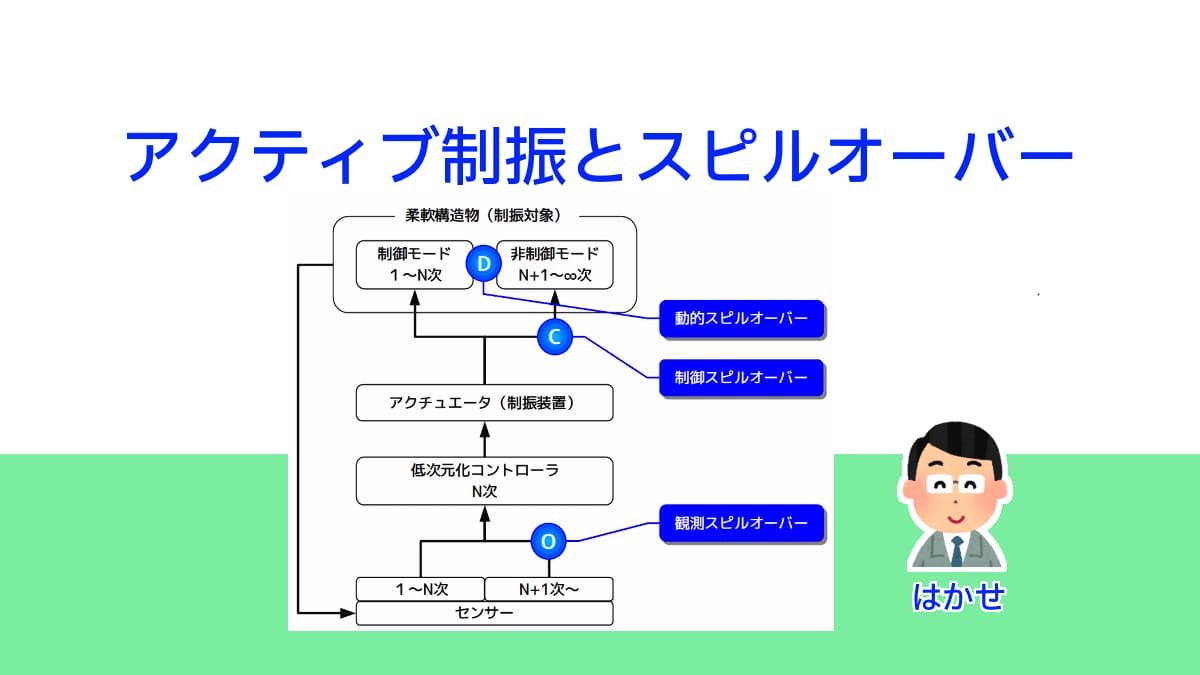
ここで、スピルオーバーのイメージを下図に示します。
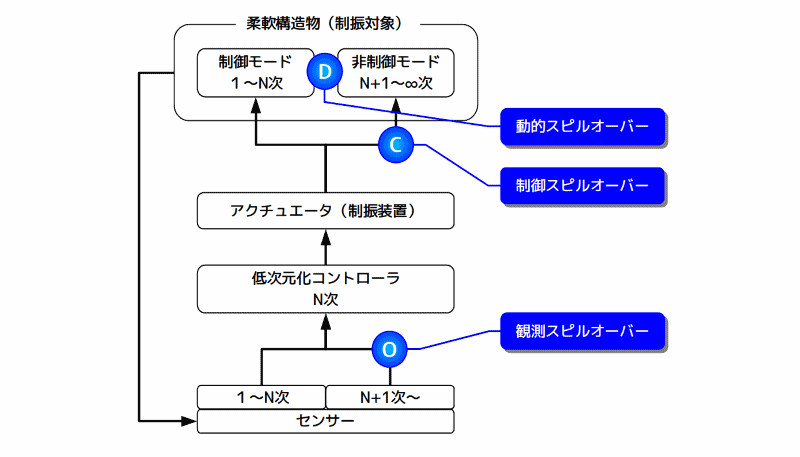
スピルオーバーのイメージ
図 スピルオーバーのイメージ
スピルオーバーは、次の3つに分類することができます。
- 観測スピルオーバー
- 非制御モードの情報を観測することにより発生するスピルオーバー
- 制御スピルオーバー
- 制御入力が非制御モードに影響を与えることにより発生するスピルオーバー
- 動的スピルオーバー
- 観測スピルオーバーと制御スピルオーバーとの連成により発生するスピルオーバー
このうち、実際の制御において特に問題となるのが、観測スピルオーバーです。
このブログでは、特にことわりのない場合、観測スピルオーバーのことをスピルオーバーと呼んでいます。
スピルオーバー対策
制振対象の低次元化に伴うスピルオーバー防止対策を列挙します。
(1)ローパスフィルタやモーダルフィルタを導入し、無視した高次モードが制御系に及ぼす影響を緩和する方法
(2)動吸振器等の減衰要素を用いて、無視した高次モードに減衰を付与し、その影響を抑制する方法
(3)無視した高次モードの影響を考慮した状態フィードバック制御系を設計する方法
これらの対策には以下様な課題があり、スピルオーバーをいかにして防止するかが課題となっています。
(1)の方法は制振性能が多少犠牲になってしまう。
(2)の方法は余分な付加物が加わることになる。
(3)の方法は制御系設計が複雑になってしまう。
そこで、このような問題への対応策の1つとして、「振動モード形を利用したモデルによるタワー構造物のLQ最適制御入門」で事例を紹介しました。モデリングの詳細については、以下のリンク先をご参照ください。
この方法は、振動モードの節が構造的に実現できる不可制御・不可観測性を有することを利用して、無視したい高次の振動モードの節をセンサーやアクチュエータ(制振装置)の取り付け場所に定め、その場所で集中定数系物理モデルを作りスピルオーバーを防止するというものです。
振動モード解析を制御系のモデリングに適用することにより、多自由度系の構造物を1自由度の振動系に分離した後で、制御モードと非制御モードとを分離し、制振対象の低次元化物理モデルを作成しています。
この物理モデルを用いれば、LQ制御理論などの確立された制御系設計法を容易に適用できるだけでなく、スピルオーバー不安定問題をも回避できます。
なお、「振動モード形を利用したモデルによるタワー構造物のLQ最適制御入門」では、センサーとアクチュエータ設置位置を振動モードの節に決めていますが、構造的な制約のため制振装置設置位置が制限される場合には、アクチュエータとセンサの設置位置と制振効果との関係が重要となります。
そこで、アクチュエータ設置位置に制約があった場合の センサの設置位置と制振効果との関係については、「センサー及びアクチュエータの配置についての実験的考察」にまとめています。
まとめ
ここでは、アクティブ制振の際に問題となる、スピルオーバーと呼ばれる不安定現象について、以下の項目で説明しました。
- 振動対策の種類:構造変更と振動制御(振動絶縁、制振)
- アクティブ制振の課題:コントローラの制約とモデリング
- スピルオーバーとは何か
- スピルオーバー対策