様々な振動問題を解決する方法の1つに振動制御があります。
ここでは、
- パッシプ(受動的)振動制御
- アクティブ(能動的)振動制御
- このブログで紹介する低次元化モデル作成法の概要
について説明します。
パッシブ振動制御とアクティブ振動制御
パッシブ振動制御の代表例は、動吸振器(どうきゅうしんき)です。TMD(Tuned Mass Damper)とも呼ばれています。
動吸振器は、動力源(エネルギー)を必要としないので構造がシンプルです。
外乱(高層ビルであれば風や地震)による振動をパッシプ(受動的)に制御します。
一方、動吸振器は設計値から外れると、制振効果が落ちてしまいます。また、実際の制振効果は、るアクティブ動吸振器ほどは大きくとれません。
アクティブ振動制御は、風などによる外乱による振動を減衰を制振装置により積極的に制御(制振)します。
アクティブ制振の場合には、制御対象のモデリングと制御系設計がポイントになります。
このブログでは、不可制御・不可観測性を利用したモデリング手法と現代制御理論の1つであるLQ制御理論による制御系設計法について説明しますが、ここでは、制振装置の種類だけ紹介します。
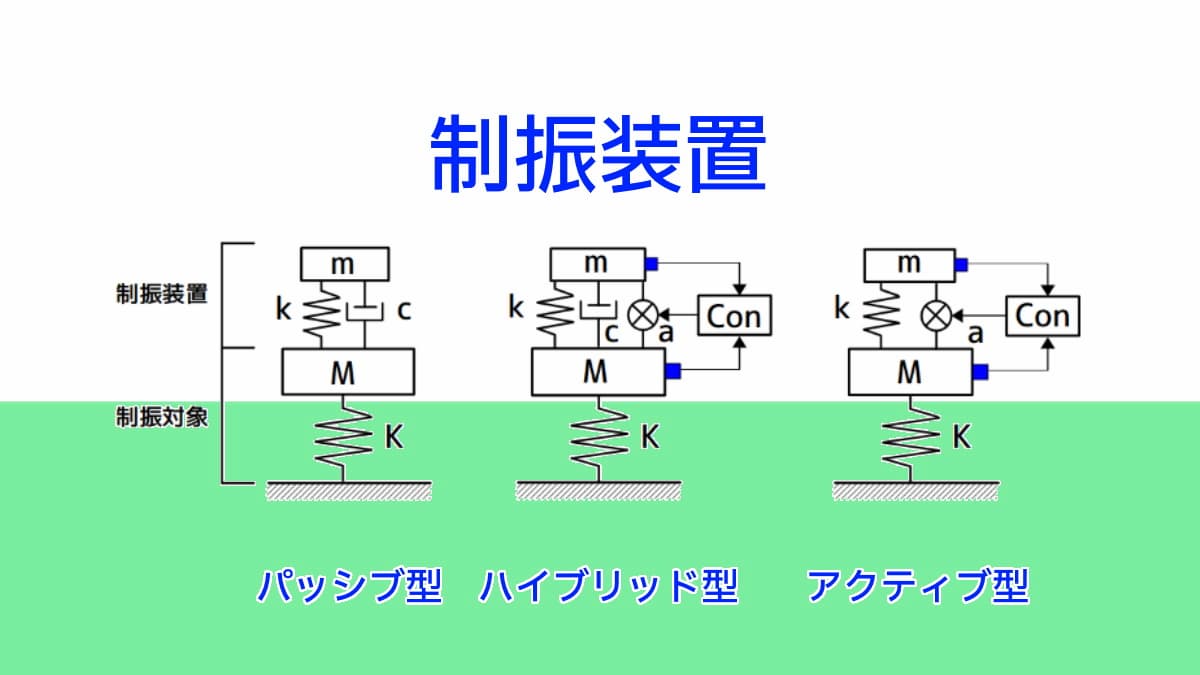
制振装置の物理モデルは、下図のようになります。
左からパッシブ型、ハイブリッド型、アクティブ型の制振装置です。ハイブリッド型は、何らかの理由により動力源が使えない場合に、パッシブ型として動作する制振装置です。
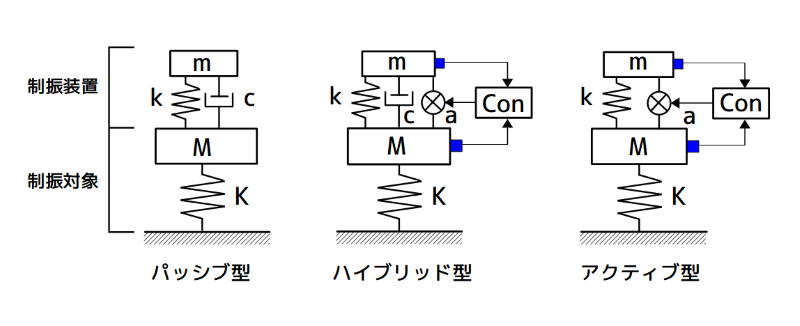
制振装置の例
図1 制振装置の例
パッシブとアクティブ制振装置の具体例
横浜マリンタワー
下図の中央のビルで、1961年に横浜みなとみらいに開業した高さ106mのタワーです。

横浜ランドマークタワー
図2 横浜ランドマークタワー
出典:Pixabayからの画像
最上部の灯台室にパッシブ制振装置「スーパースロッシングダンパー」があります。複数の円筒形の容器(中に水が入っている)からできています。
スーパースロッシングダンパーの写真が、ウィキペディアにありましたので紹介しておきす。
横浜マリンタワー 全体概要
横浜ランドマークタワー
1993年に開業した高さ296.33mの超高層ビルです。
最上部の対角の2か所に振り子型の制振装置を備えています。
制振装置についてウィキペディアにありましたので紹介しておきます。出典[12]のリンク先に制振装置の写真がありました(2019.3.24現在)。
ランドマークタワー建設現場の外から制振装置が見えたことがあり、さすがに300mのタワーに使う制振装置は大きいなと思ったことを覚えています。
横浜ランドマークタワー 全体概要
アクティブ制振の流れ
アクティブ制振の流れについて簡単に説明します。
①制振対象の振動モード解析
振動モード解析により、共振周波数における振動モード形状、振動モードの節と腹の位置を明確にします。
②制振対象モードの決定
制振対象モードを決めます。低い方から何次の振動モードまでを制御するかを決めます。
③低次元化モデルの作成
作成した低次元化モデルが不適切な場合、制振のための制御により制振対象が発振、破壊に至ることがあります。この現象はスピルオーバーと呼ばれています。
このブログでは、スピルオーバー対策として、振動モード形の節を積極的に利用する「不可制御・不可観測性を活用した低次元化モデル作成法」を使います。
この低次元化モデル作成法のイメージは、
制振装置設置位置に振動モード形の節を選ぶと、モードを刺激しない。つまり、制御できない。
センサーを振動モード形の節に設置すると、そのモードは観測できない。つまり、制振装置のコントローラに入力されない。
ということです。
④制御系設計
現代制御理論の1つである、「LQ制御」により制御系を設計します。
⑤数値解析
シミュレーショにより④で設計したコントローラの制御ゲインを決めます。
⑥実験(検証)
実験により、シミュレーション通りか検証します。
スピルオーバー現象の概念
ここで、スピルオーバー現象について説明します。
スピルオーバー現象とは、対象物に低次元化モデルを作成する時に無視したモードの影響で、制振のため制御を掛けた時に発振してしまう現象です。
制御スピルーバーと観測スピルオーバーについて簡単に説明します。
制御スピルオーバー
コントローラから出力された制御信号により、制振装置(アクチュエータ)から制御対象に制御力を加えます。
この制御力により、制御対象の低次元化モデルに含まれていない振動モード(通常は、制御対象モードの直上の振動モード)を刺激してしまい、発振することがあります。
これを制御スピルオーバーといいます。
観測スピルオーバー
制御対象の振動をセンサーが検出しコントローラに入力します。
このセンサーの信号が低次元化コントローラ(ここでいう低次元化コントローラとは、制振対象の低次元化モデルに合わせて設計したコントローラのことです)に含まれていない振動モード(通常は、制御対象モードの直上の振動モード)を刺激し、発振してしまう現象です。
これを観測スピルオーバーといいます。
不可制御・不可観測性を活用した低次元化モデル作成
振動モード形を考慮した低次元化モデル作成について説明します。
制振対象の1自由度系低次元化モデル作成
下図は、高層ビルやタワーのような構造物を1自由度系に低次元化するイメージです。
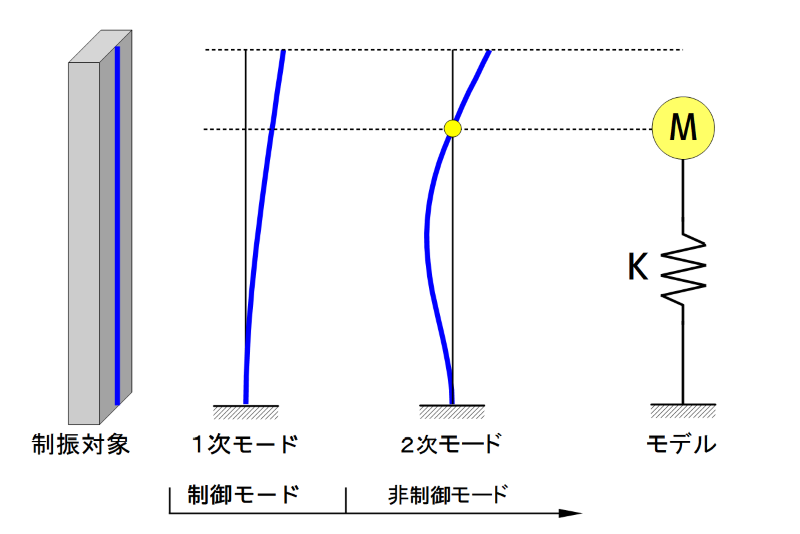
1自由度系への低次元化イメージ
図3 1自由度系への低次元化イメージ
ここでは、制振対象の1次の振動モードを制御します。
制御対象のモデルは、1自由度系の物理モデルとなります。
①制振対象の振動モード解析
制振対象の振動1次と2次の振動モード形を明らかにします。
②制振対象モードの決定
1次の振動モードを制御することします。
③低次元化モデルの作成
2次モードの節で制振対象を1自由度系に低次元化します。(制振対象の1自由度系の低次元化モデルを作成します。)
この際、制振装置の設置位置(制御力の入力位置)とセンサーの設置位置(制振対象の観測点)を2次モードの節に選ぶことにより、2次モードによるスピルオーバーの発生を防止しています。
制振対象の2自由度系低次元化モデル作成
下図は、高層ビルやタワーのような構造物を2自由度系に低次元化するイメージです。
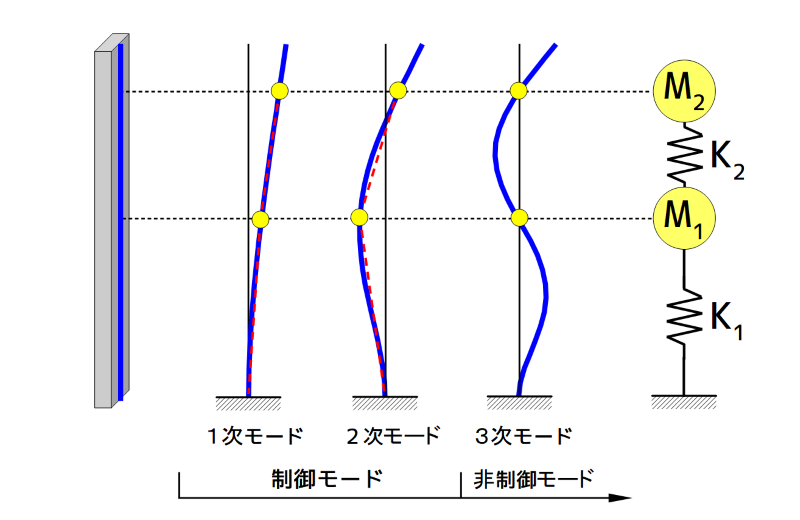
2自由度系への低次元化イメージ
図4 2自由度系への低次元化イメージ
ここでは、制振対象の1次と2次の振動モードを制御します。
制御対象のモデルは、2自由度系の物理モデルとなります。
①制振対象の振動モード解析
制振対象の振動1次~3次の振動モード形を明らかにします。
②制振対象モードの決定
1次と2次の振動モードを制御することします。
③低次元化モデルの作成
3次モードの節で制振対象を2自由度系に低次元化します。(制振対象の1自由度系の低次元化モデルを作成します。)
この際、制振装置の設置位置(制御力の入力位置)とセンサーの設置位置(制振対象の観測点)を3次モードの節に選ぶことにより、3次モードによるスピルオーバーの発生を防止しています。
まとめ
ここでは、振動制御について、以下の項目について説明しました。
- パッシプ(受動的)振動制御
- アクティブ(能動的)振動制御
- このブログで紹介する低次元化モデル作成法の概要