
久しぶりにAmazonで見かけたシャア専用ザクからしばし没頭したガンプラ製作でしたが、一休みして動くものを作りたいと思い、買ってみたのがイーケイジャパンの「トリプルレンジャー」です。
早速購入し、ローバー、グリッパー、フォークリフトへの組み替え、リモコンでの前後進、旋回などをさせました。プラモデルとは違う動くモノの面白さを味わいました。
IchigoJamとの出会い
しばらくして、こどもパソコン IchigoJamを知り、結構面白そうなので早速IchigoJamのキット(パーツセット)を買い、半田付けして動作確認、無事動きました。
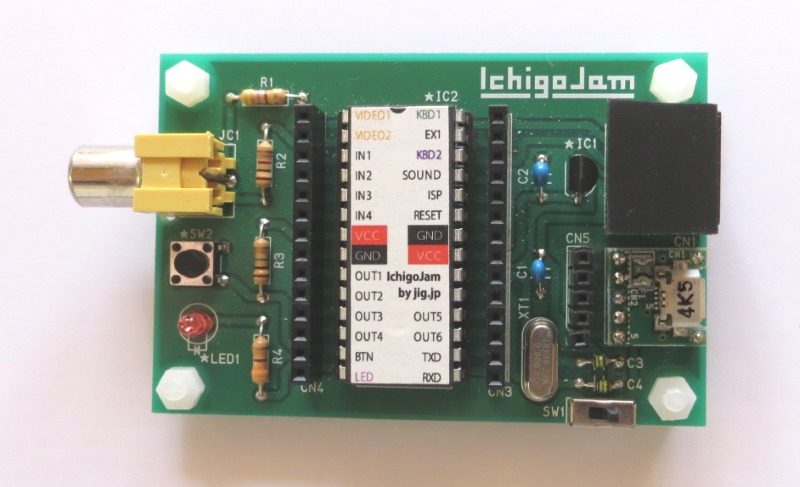
自分で組み立てたIchigoJam
私が購入したIchigoJamです。
キットを組み立てました。
キットは抵抗などを半田付けしますが、完成品も販売されています。
IchigoJamでトリプルレンジャーを動かしてみる
その後、公開されているゲームを入力して遊ぶなどしていたIchigoJamでしたが、DCモーターをコントロールできることを知り、何かを動かしたいなと思っているうちに、トリプルレンジャーが眠っていることに気付いたのでした。
こうして、IchigoJamでトリプルレンジャーを動かす(自走させる)工作が始まりました。
幸いトリプルレンジャーのリモコンと本体とは、コネクタで接続されていたので車体部のみ利用しています。
この段階で、IchigoJam本体と電池ボックスは、トリプルレンジャーの車体に積めそうだと判断しました。
IchigoJamによるモーターのON/OFF制御
まずはIchigoJamでモーターを回すことから始めました。
この流れを文字で表すと、
- IchigoJamのコマンド「OUT」を実行
- モータードライバ
- モーターに5v出力
- モーター回転
- ギアボックス
- キャタピラ駆動
と長くて分かりにくくなりますが、簡単に言うと、IchigoJamのコマンド「OUT」でキャタピラが回りだします。
前進か後進かはコマンドで指定します。
必要なものを接続して、IchigoJamで2個のモーターをON/OFさせたいのですが、ここで足りないものが。
IchigoJamの出力信号(5V)では、DCモーターを直接回せないので、Google先生の助けを借りて2個のモーターを回せるモータードライバを自作しました。
1つめのモータードライバの回路は失敗でした。動くような動かないようなよく分からない状況で、2つめの回路は回路図(配線図)を手書きで作り、モーターを回せることは確認できました。
こうして、動きはしたものの、私の美しくない半田付けの自作回路は信頼性も低く、「もうちょっときれいに作りたいな、でも、私のスキルでは相当練習しないと難しいな。」と思っていたところ、IchigoJamでモーターやサーボを使えるMapleSyrup(めいぷるしろっぷ)が発売となりました。
もちろん、速攻で注文しました。
MapleSyrupでいちごロボ製作
さすがに売っているものは確実に動くので、トリプルレンジャーの車体を利用して、IchigoJamや電池ボックスを搭載して、いちごロボを作り始めました。
MapleSyrupによるトリプルレンジャーの車体の自走は、簡単にできました。
さすが、市販品は違うなと・・・。
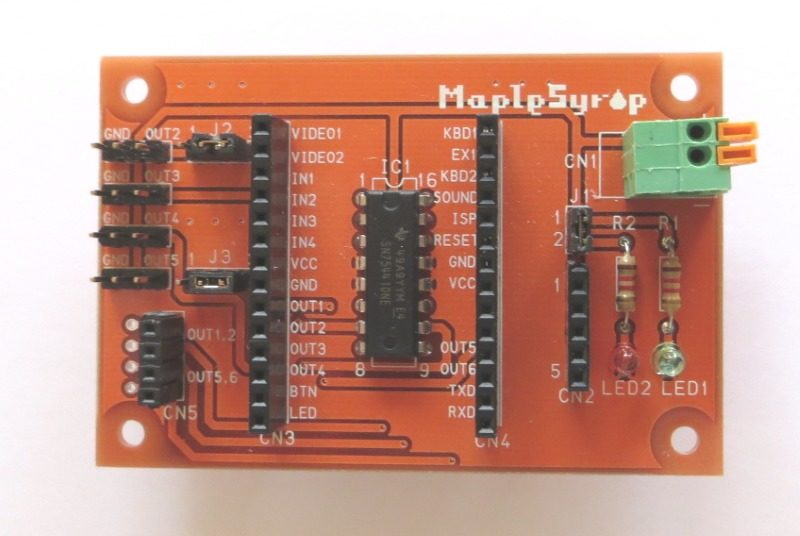
購入したMapleSyrup
腕を動かす
MapleSyrupを使えば、いちごロボの自走に必要な2個のモーターの他に、さらに2個のモーターかサーボモーターを使えるので、いちごロボに腕をつけることにしました。
サーボモーターを購入し、両腕を動かします。
左右の腕を動かす場合、プログラム上はサーボモーターの回転方向が逆になるので少々てまどりましたが、動作確認は無事終了。

いちごロボに使ったサーボモーターと距離センサー
いちごロボの外装(頭、胴体、腕)を作る
トリプルレンジャーの車体を利用していちごロボにするため、ロボットの腕をつけるためボディは紙で製作することにしました。
少しはロボットらしくしようと、ペーパークラフトの残り紙などを利用して、ボディ、頭、腕を作成、センサー部分がむき出しだったので、カンガルー風に子供の頭を追加してみました。
これもざっくり切り貼りで作り始めたので、何度かの作り直しをしています。
距離センサーを追加
自走させるには、障害物までの距離を測る必要があります。
ここまででIchigoJamでは、2個のモーターと2個のサーボモーターを使っていますが、まだセンサーも利用できるため、センサ(測距モジュール)を購入、センサの動作確認まで行い、いちごロボに搭載しました。
センサーは車体前方で、いちごロボの見映え優先で、カンガルーの親子をイメージした外装(頭)をこちらも紙で作りました。
なお、実装はしたもののセンサーがうまく動いていないようで、機能確認とプログラムの調整が面倒になり、こちらはとりあえず放置してしまいました。
いちごロボのその後
後は、どのように動かすかを決めてプログラムすればよいのですが、プログラミングそのものにはあまり興味がなく、トップの写真を残すのみです。
この記事に関する関連情報
以下に、IchigoJam、MapleSyrup、使用した部品などについて紹介します。
IchigoJamとは
手のひらにのせられる大きさ(50mmx75mm)のプログラミング専用こどもパソコンです。IchigoJamにテレビ(黄色のビデオ端子)とキーボード(PS/2)をつなげば、すぐにプログラミングを始めることができます。
プログラミング言語にIchigoJam BASICを使っているので、初心者でも気軽にプログラミングを体験できます。
例えば、LEDの点灯・消灯は、
キーボードで「LED 1」と入力、「エンター」キーを押す。
→ IchigoJamのLEDが点灯します。
キーボードで「LED 0」と入力、「エンター」キーを押す。
→ IchigoJamのLEDが消灯します。
といった感じです。
IchigoJamボードのボタンを押すとLEDが点灯、離すと消灯するプログラムは、
10 LED BTN() 20 GOTO 10
(※行の頭の数字は、プログラムの行番号です。)
といった感じです。
他にも、
- サーボモータを利用できるので左右の腕を上下に振ることができます。
- 測距センサーで距離を計測し、障害物に近づくとバックして進むなどの動作もプログラムで実現することができます。
MapleSyrupとは
MapleSyrupは、IchigoJamでモーターやサーボモーターの制御が簡単にできる『こどもモーターボード』です。
この記事では、マイクロサーボと測距モジュールを使っています。
IchigoJamとこの記事に関するリンク一覧
- IchigoJam公式サイト : https://ichigojam.net/
- MapleSyrup : http://maplesyrup.shizentai.jp/
- 秋月電子通商 : http://akizukidenshi.com/
- モータードライバなどの部品を購入しました。
- カムロボ部 : https://na-s.jp/camrobo.html
- 素材にするロボットは、タミヤのカムロボがオススメです。
まとめ
ここでは、IchigoJamを使ったON/OFF制御によるいちごロボの自動走行について、以下の内容について説明しました。
- IchigoJamとの出会い
- IchigoJamでトリプルレンジャーを動かしてみる
- IchigoJamによるモーターのON/OFF制御
- MapleSyrupでいちごロボ製作
- いちごロボのその後
- この記事に関する関連情報
