 プログラミング
プログラミング 待ちに待ったIchigoJam BASICバージョン1.4公開
こどもパソコンイチゴジャムのIchigoJamBASICバージョン1.4がリリースされました。フルカラーLEDを使えたりする機能追加ができた理由や、プログラミング教材として開発されたIchigoDyhook(いちごだいふく)を紹介します。
プログラミング  振動制御入門
振動制御入門 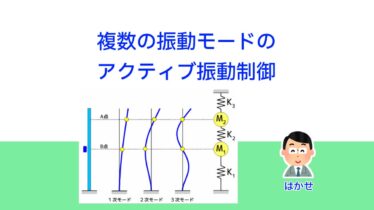 振動制御入門
振動制御入門 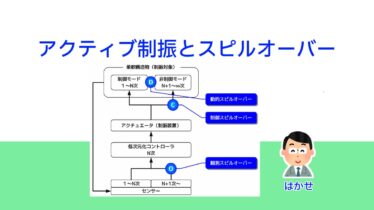 振動制御入門
振動制御入門  振動制御入門 振動制御入門 振動制御入門
振動制御入門 振動制御入門 振動制御入門 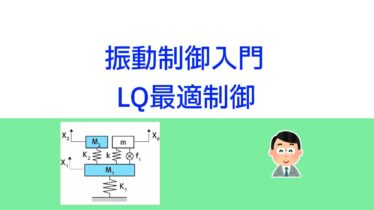 振動制御入門 振動制御入門
振動制御入門 振動制御入門 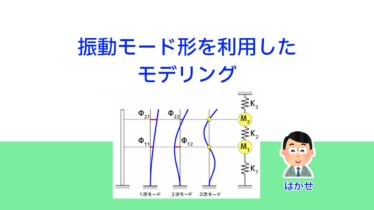 振動制御入門
振動制御入門