ここでは、平板の周辺を固定した振動モード形と放射音(音響モード)について説明します。
解析対象について
「基本的な振動モード形:平板の周辺固定の場合」では、長方形に近い形状(140x40x5 mm)だったため対象モードが分かりにくかったため、ここでは縦横を2:1とした140x70x2 mmのアルミ板を対象に選び、FreeCADの固有値解析を行い作成した振動モード形について説明します。
解析モデルを下図に示します。周辺固定としています。
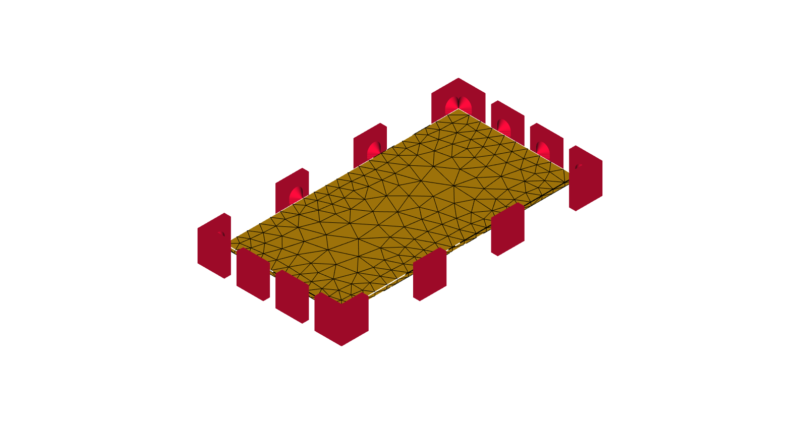
解析モデル
振動モード形と放射音との関係
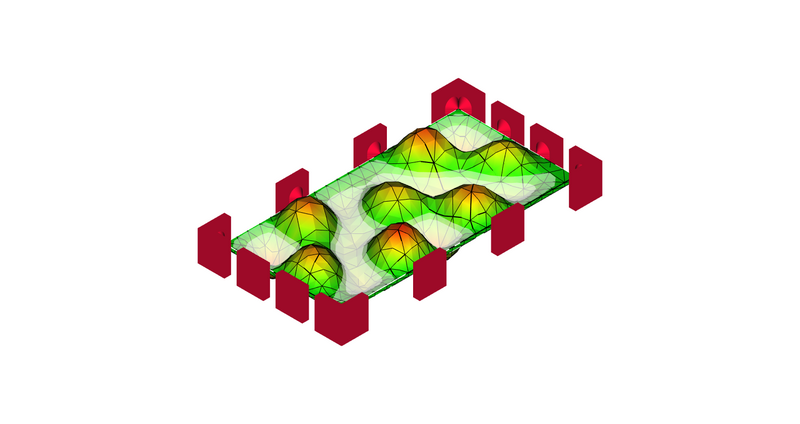
ここで対称モードと呼んでいる振動モード形について説明します。
対象モードとは、例えば2次モードの様に、吹き出しと吸い込みの位相(方向)が対照的な同じ形状の振動モード形となっているモード形のことで、平面全体から放射される振動エネルギーが吹き出しと吸い込みで振動が打ち消されると考えられるモードのことです。
なお、音響モードと言う場合には、実際に放射される音をマイクをつかった計測データより可視化したモードのことです。シミュレーションの放射音解析の場合には、ここでの例で説明すると平板の振動が音としてどれだけ放射されるかを解析します。
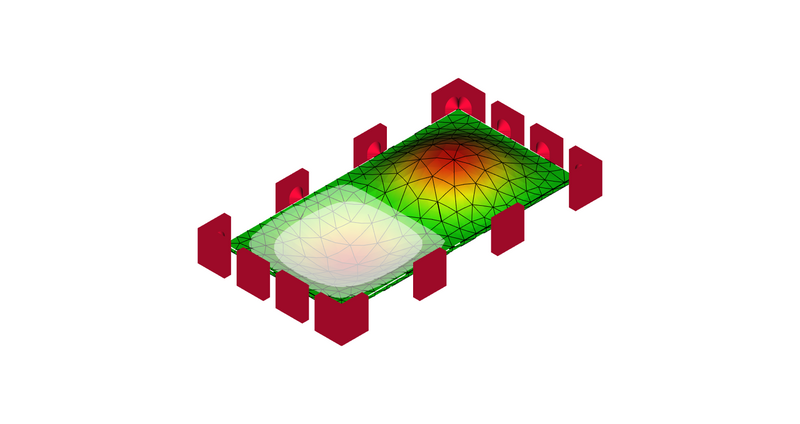
対象モードの例
壁の制振(振動制御)と遮音について
遮音と言った場合、音を遮ることを意味しますが、壁の振動を制御する制振の場合は、制御対象とした振動モード(共振周波数)を制御することになります。
高い周波数の音や振動は、減衰材料などにより低い周波数よりも容易に低減することができます。
低い周波数を制御すると制御用のデバイス(アクチュエータ)により減衰も多少付加されるため、高い周波数でも音や振動の低減効果を期待できます。
例えば、平板の中央を制御点に選んだ場合(ここでは、10次モードまでを検討範囲としています。)、
制御可能な振動モードは、1次、3次、8次モードであり、制御可能、1次モードが最も制御効果を期待できます。
そして、その他のモードは、吸い込みと掃き出しで放射音が相殺されると考えられるモードとなります。
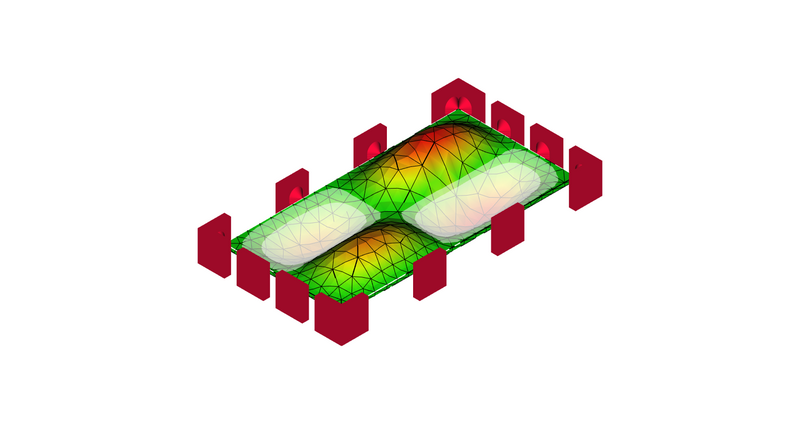
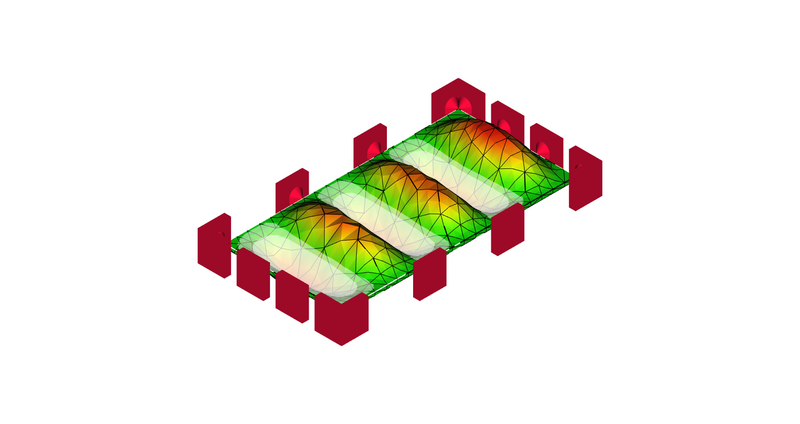
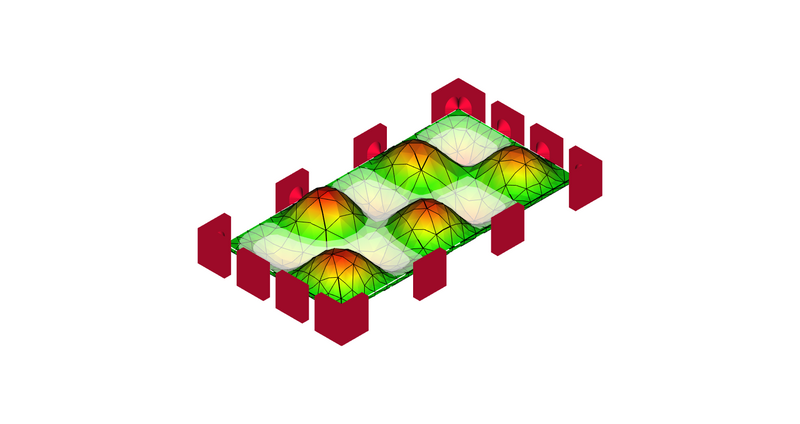
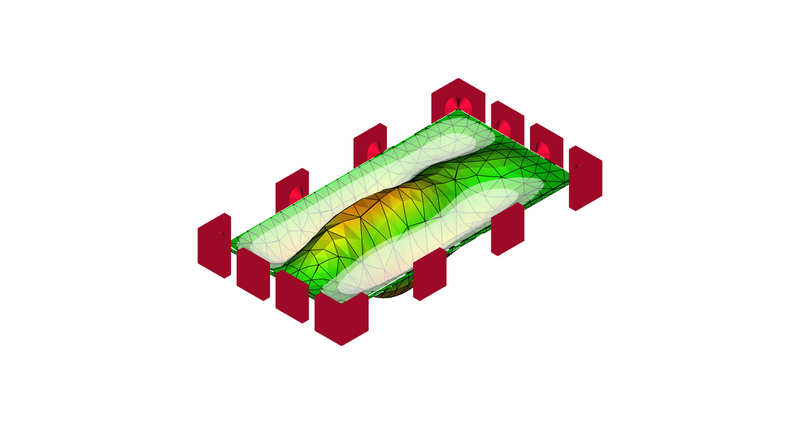
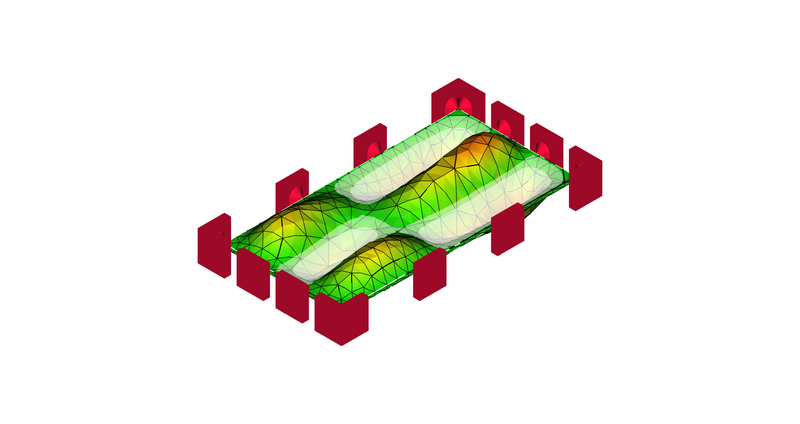
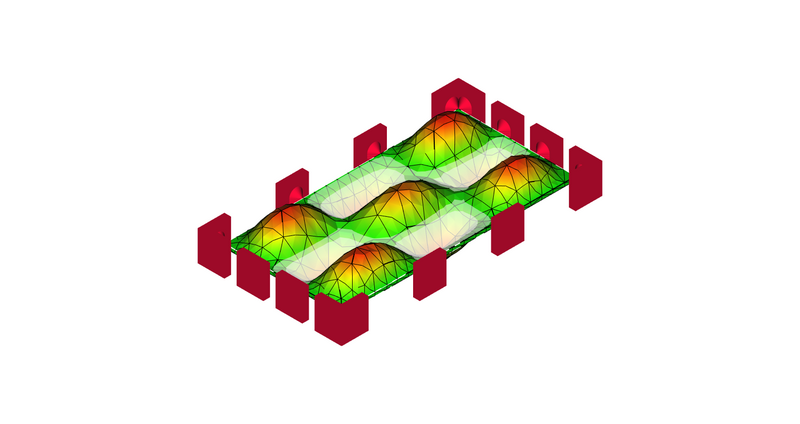
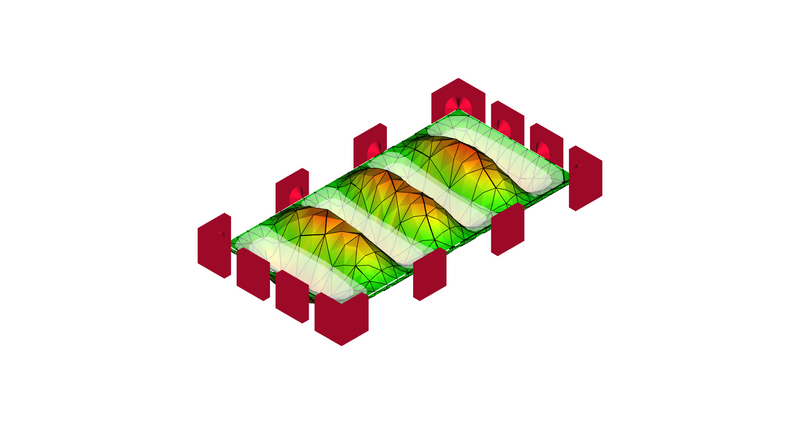
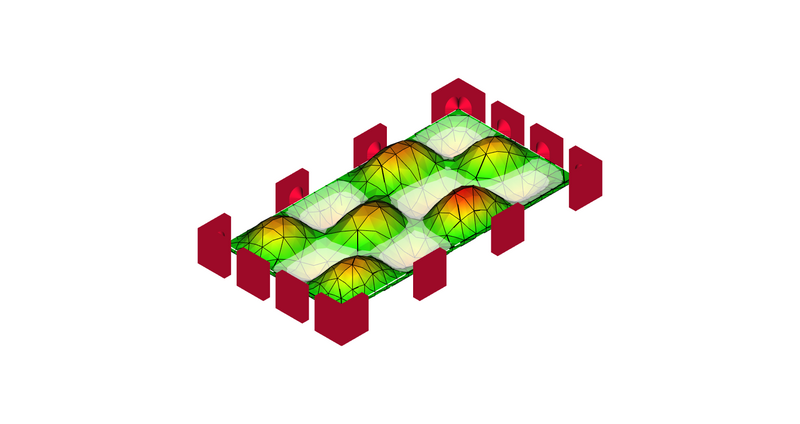
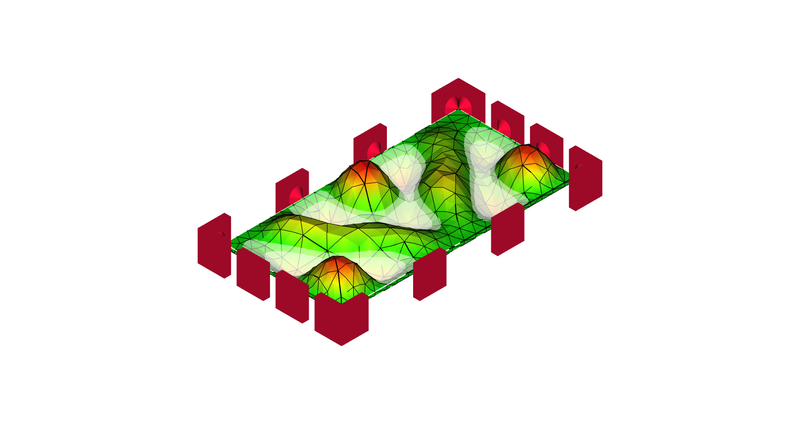
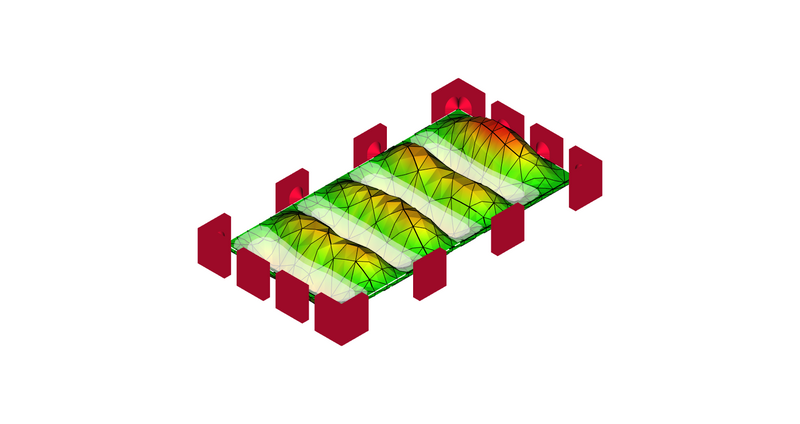
振動モード形一覧
規則的に腹と節(吐き出しと吸い込み)の位置が増えています。
1次モード
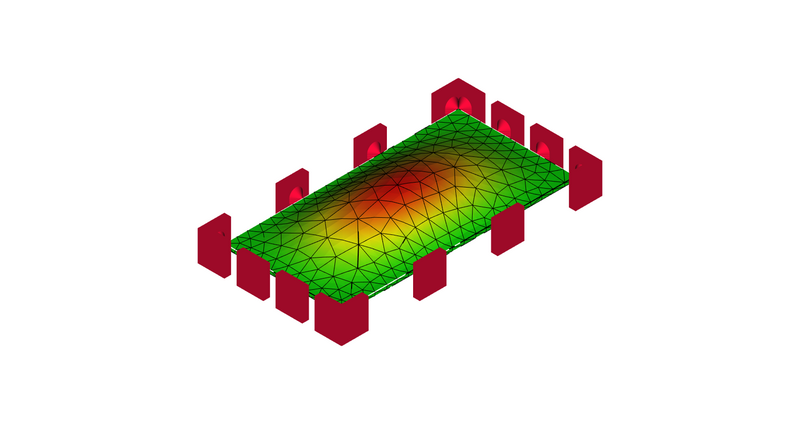
1次モード
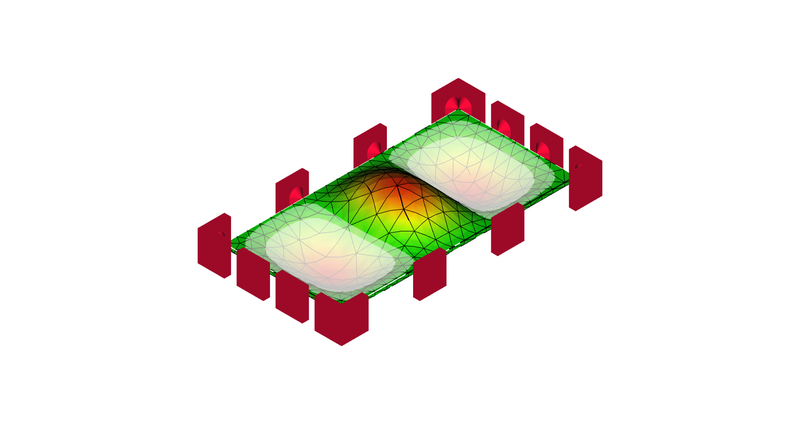
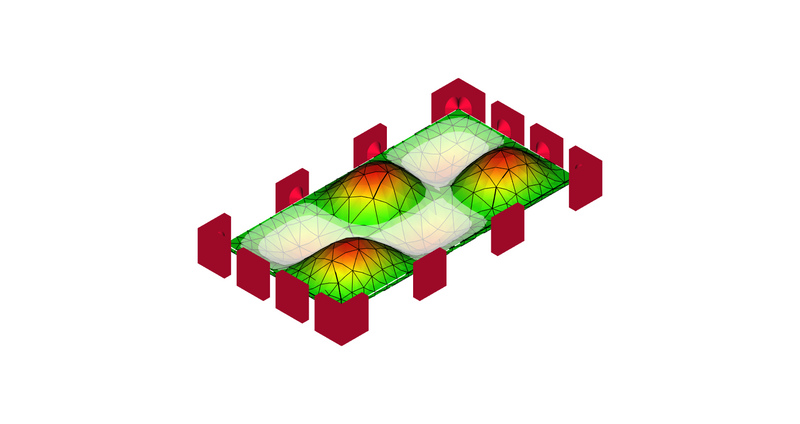
2次モード
2次モード
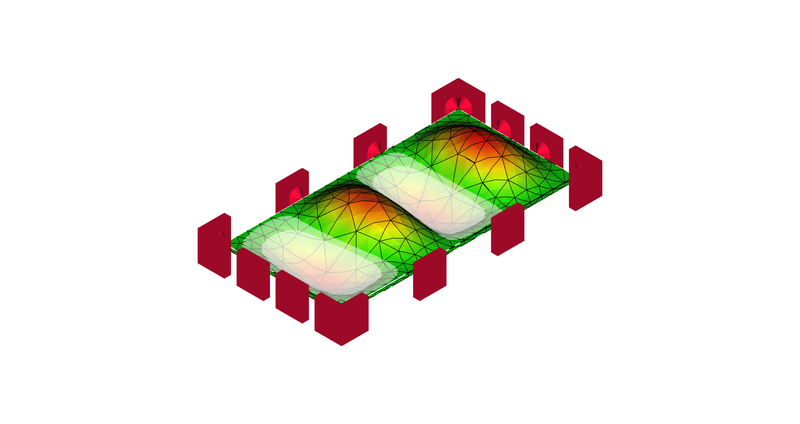
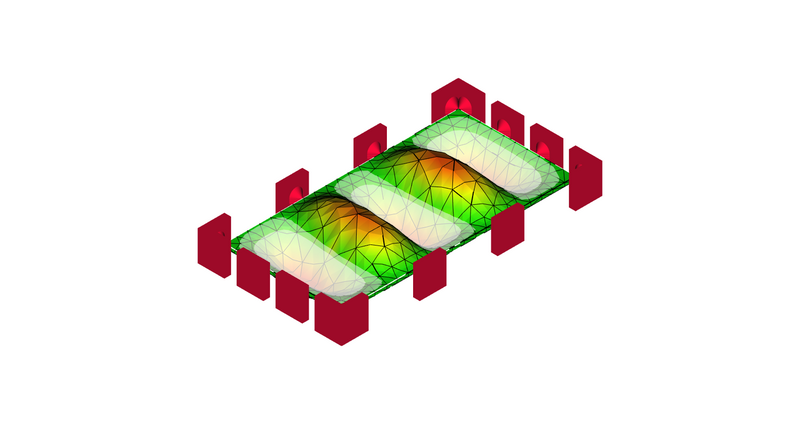
3次モード
3次モード
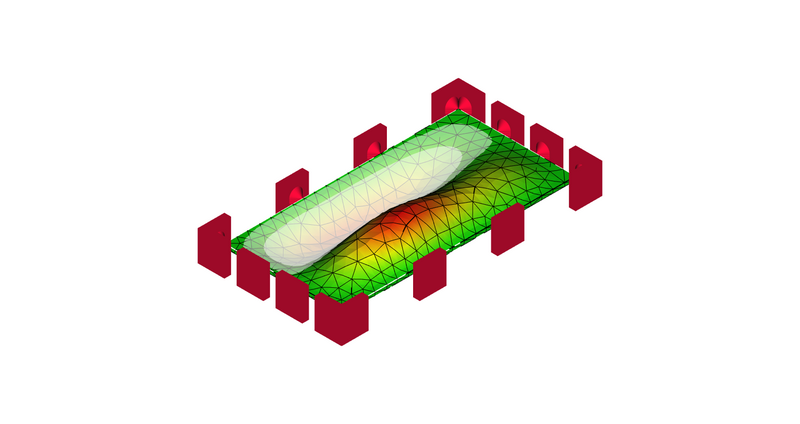
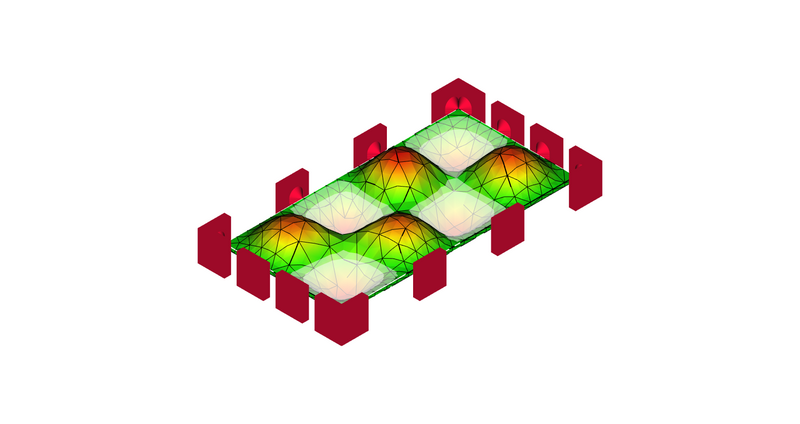
4次モード
4次モード
5次モード
5次モード
6次モード
6次モード
7次モード
7次モード
8次モード
8次モード
9次モード
9次モード
10次モード
10次モード
11次モード
11次モード
12次モード
12次モード
13次モード
13次モード
14次モード
14次モード
15次モード
15次モード
16次モード
16次モード
17次モード
17次モード
18次モード
18次モード
19次モード
19次モード
20次モード
20次モード
モデリングと制御系設計について
FEMの解析結果から振幅の最も大きい1次の振動モードを制御するためのモデリングと制御系設計について説明します。
制振対象の低次元化モデルの作成
ここでは、制御対象モードを1次モードとします。
制振対象の平板を下図で示す平板の中央(青い矢印の先の点)、1次の振動モード形の腹で、等価質量同定法により1自由度系に低次元化します。
制振装置には、減衰要素を含むハイブリッド型のアクティブ動吸振器を選んでいます。
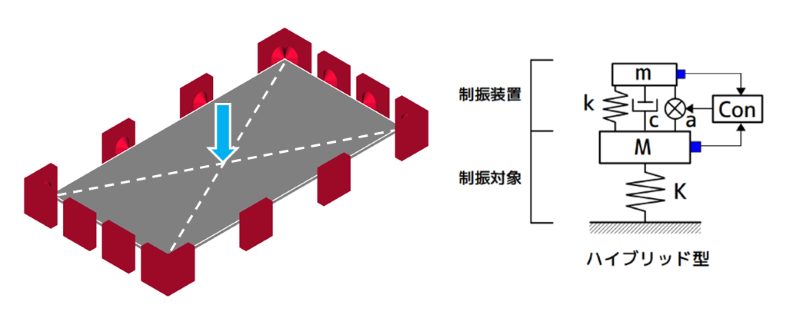
平板の低次元化モデル作成
制御系設計
制振対象と制振装置のの運動方程式を立て、状態方程式に変換し、制御系設計ツールを使い、LQ制御系を設計します。
制振効果は、制御系設計ツールでシミュレーションし、実験で検証します。
スピルオーバー対策について
スピルオーバーとは、制振対象を低次元化する時に無視したモード(この例では2次以上の振動モード)の影響で、制御により発振してしまう現象です。
【参考】スピルオーバーの概念
下図において、左側が1次モード、右側が2次モードです。
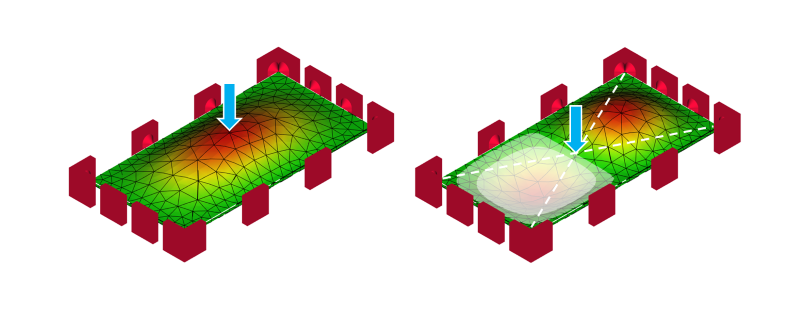
スピルオーバーの説明
今回の例では、1次モードの腹で平板の低次元化モデルを作成していますが、このモデル化した点は2次モードでは節と一致しています。このため、2次モードは不可制御となりスピルオーバーが発生しません。
3次モードでは、モデル化した点が腹となっているため、スピルオーバーの発生が懸念される場合には3次モードを含めた低次元化モデルを作成する必要があります。
なお、今回は、ハイブリッド型のアクティブ動吸振器を使用しているため、高次モードに対してもある程度の減衰効果が期待できますが、実際に制振する場合には、実験での検証(事前確認)が必要になります。
まとめ
ここでは、平板の周辺を固定した振動モード形と放射音(音響モード)、モデリングと制御系設計について説明しました。
- 振動モード形と放射音との関係
- 壁の制振(振動制御)と遮音について
- 振動モード形一覧
- モデリングと制御系設計